Implementando animaciones en C++ mediante ROOT
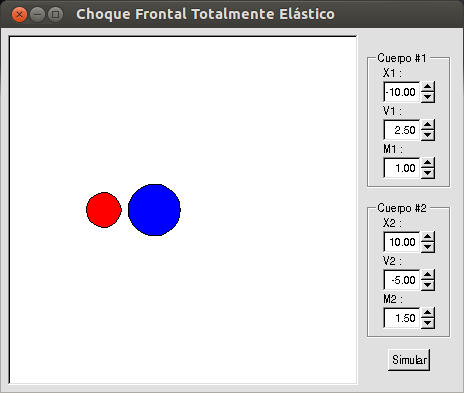
Objetivo: Simular un choque frontal perfectamente elástico con el fin de mostrar el uso de la clase TTimer para lograr la visualización de figuras en movimiento.
El código utilizado para realizar la simulación es el siguiente:
// Update: 2013-09-12 10:11:09-0500
// Archivo: choques.C
// Para mayor información:
// http://www.k-lab.tk/content/physics/root/gui.php
// Ejecutar con:
// $root -l choques.C
float m1,m2; //Masas
float v1i,v2i; //Iniciales
float v1f,v2f; //Finales
float v1,v2; //En un instante dado
float x1,x2; //posiciones
float t,dt; //tiempo
TEllipse *Cuerpo1,*Cuerpo2; //Representación del cuerpo
TCanvas *Lienzo; //Espacio de visualización
void Reubicar(){
//Condición de Choque
if ((x1+Cuerpo1->GetR1())>(x2-Cuerpo2->GetR1())){
v1 = v1f;
v2 = v2f;
}
t = t + dt; //Avanzamos en el tiempo t+=dt
x1 = x1 + v1*t; //Calculamos la nueva posición del cuerpo 1 x1+=v1*t
Cuerpo1->SetX1(x1); //Cambiamos la posición de la representación del cuerpo
Cuerpo1->Draw(); //Ejecutamos Draw() para actualizar la posición del cuerpo en el "Espacio de visualización"
x2 = x2 + v2*t; //Calculamos la nueva posición del cuerpo 2 x2+=v1*t
Cuerpo2->SetX1(x2); //Cambiamos la posición de la representación del cuerpo
Cuerpo2->Draw(); //Ejecutamos Draw() para actualizar la posición del cuerpo en el "Espacio de visualización"
Lienzo->Update(); //Actualizamos el Lienzo == "Espació de visualización"
}
void choques(){
//Pasos del taller:
//Declaración de variables
//Asignación de valores
//Crear Lienzo
//Crear Cuerpo1
//Escribir Reubicar()
//Crear Cuerpo2
//Establecer el condicional
//---------------------------------------------
//Condiciones del choque
t = 0.0;
dt = 1e-3;
m1 = 1.0;
m2 = 1.5;
v1i = 2.5;
v2i = -5.0;
v1 = v1i;
v2 = v2i;
//x1 siempre tiene que estar antes de x2 según nuestra condición de choque (ver Reubicar())
x1 = -10;
x2 = 10;
//---------------------------------------------
//Calcular a partir de los datos asignados las "velocidades" finales
v1f=(v1i*(m1-m2)+2*m2*v2i)/(m1+m2);
v2f=(v2i*(m2-m1)+2*m1*v1i)/(m1+m2);
//Crear y configurar el "Espacio de visualización
Lienzo = new TCanvas();
Lienzo->SetWindowSize(600,600); //Tamaño en píxeles
Lienzo->Range(-12.0,-12.0,12.0,12.0); //Ajustar el sistema coordenado
//Crear y configurar la representación del cuerpo 1
Cuerpo1 = new TEllipse();
Cuerpo1->SetFillColor(2); //Color de relleno
Cuerpo1->SetR1(m1); //El radio es proporcional a la masa
Cuerpo1->SetR2(Cuerpo1->GetR1()); // r1==r2 para que sea un círculo
Cuerpo1->SetX1(x1); //Posición inicial
Cuerpo1->SetY1(0.0); //Posición inicial
Cuerpo1->Draw(); //Mostrar en el lienzo
//Crear y configurar la representación del cuerpo 2
Cuerpo2 = new TEllipse();
Cuerpo2->SetFillColor(4);
Cuerpo2->SetR1(m2);
Cuerpo2->SetR2(Cuerpo2->GetR1());
Cuerpo2->SetX1(x2);
Cuerpo2->SetY1(0.0);
Cuerpo2->Draw();
//TTimer se encarga de ejecutar la función comando cada n (n=20) ms
Animador = new TTimer(20);
Animador->SetCommand("Reubicar()"); //Se asigna la función comando
Animador->TurnOn(); //Se activa la instancia
}
La extensión con una interfaz gráfica del prototipo realizado (que se muestra en la imagen al incio de la página) se puede descargar aquí. No olvide visitar Introducción al desarrollo de interfaces gráficas de usuario en ROOT para mayor información.
Comentarios
This work is licensed under a
Creative Commons Attribution-ShareAlike 2.5 Colombia License.
I'm committed to your privacy. Each time you access content delivered by http://www.andresv.co/, information such as referrer, anonymized IP (255.255.X.X), date, time, and requested resources is sent to Google Analytics. This is done to better understand user preferences, adapt our content to users' needs, and detect failures on the website. However, respecting your decision, we do not store any of this information if you have enabled the Do Not Track option in your web browser (Preferences/Privacy/Tracking/Tell Websites I do not want to be tracked). Protect your privacy.